 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Independent Manipulation: Individual Fairness-aware Strategic Classification with Peer Imitation
May 30, 2026Strategic classification (SC) investigates scenarios where agents manipulate their features to obtain favorable decisions from predictive models. Existing fairness-aware SC approaches primarily focus on group fairness and typically assume that agents respond independently. However, when individual fairness is required, ensuring similar individuals receive similar outcomes, agents' manipulation becomes interdependent: an agent's preferred manipulation depends on the neighborhoods' outcomes. This induces a mismatch between classical SC formulations and fairness-aware decision settings, where independent models no longer accurately characterize strategic manipulations. To address this issue, we introduce individual fairness-aware strategic classification (IFSC), a framework that models peer-driven manipulation arising from individual fairness, where agents imitate nearby positively decided peers to obtain favorable outcomes. IFSC characterizes strategic manipulation as similarity-based imitation toward visible accepted peers and learns classifiers under the resulting post-manipulation distributions. To account for uncertainty in peer observability, IFSC employs a robust learning process that introduces stochastic perturbations during manipulation simulation. Experiments on synthetic and real-world datasets demonstrate that IFSC improves individual-fairness consistency and mitigates imitation-induced distortions.
Bayesian Gated Non-Negative Contrastive Learning
May 27, 2026While Contrastive Learning (CL) has revolutionized self-supervised representation learning, its latent representations remain highly entangled and opaque, limiting their interpretability in safety-critical applications. We identify that a fundamental cause of this entanglement is the reliance on deterministic similarity measures, which treat all feature dimensions equally. In compositional scenes, this creates an Optimization Conflict: common background features, such as, "blue sky", are encouraged to align in positive pairs but simultaneously repelled in negative pairs, causing gradient oscillations that hinder precise semantic disentanglement. To address this, we propose BayesNCL (Bayesian Gated Non-Negative Contrastive Learning). Unlike standard approaches, BayesNCL introduces a probabilistic gating mechanism that dynamically filters out task-irrelevant, high-frequency common features while selectively retaining discriminative semantics. By formalizing feature selection as a variational inference problem with a sparse Bernoulli prior, our method effectively resolves the optimization conflict. Empirical experimental results on Imagenet-100 demonstrate that BayesNCL achieves a remarkable 142.1% improvement in semantic consistency compared to state-of-the-art baselines, yielding highly interpretable representations without compromising downstream task performance. Code is available at https://github.com/Cui-Peng-624/BayesNCL.
SARAD: LLM-Based Safety-Aware Hybrid Reinforcement Learning with Collision Prediction for Autonomous Driving
May 27, 2026Ensuring both safety and efficiency in decision-making for autonomous driving systems remains a fundamental challenge. Traditional Deep Reinforcement Learning (DRL) suffers from unsafe random exploration and slow convergence, while Large Language Models (LLMs) demonstrate inherent latency in real-time inference operations. To address these limitations, this paper proposes SARAD, a novel safety-aware hybrid framework that synergizes LLMs and DRL for autonomous driving. SARAD substitutes the random exploration of DRL with Retrieval-Augmented Generation (RAG)-enhanced, LLM-guided decisions sourced from a dynamic expert knowledge repository. An attention discriminator is proposed to integrate the prior knowledge of LLMs into DRL policy optimization. A collision predictor module, fine-tuned with historical collision data, is further designed to improve vehicle safety. Extensive experiments show that SARAD achieves significant performance improvements in the Highway-Env simulator, validating the effectiveness of the proposed model in autonomous driving.
A Knowledge-Informed Pretrained Model for Causal Discovery
Mar 21, 2026Causal discovery has been widely studied, yet many existing methods rely on strong assumptions or fall into two extremes: either depending on costly interventional signals or partial ground truth as strong priors, or adopting purely data driven paradigms with limited guidance, which hinders practical deployment. Motivated by real-world scenarios where only coarse domain knowledge is available, we propose a knowledge-informed pretrained model for causal discovery that integrates weak prior knowledge as a principled middle ground. Our model adopts a dual source encoder-decoder architecture to process observational data in a knowledge-informed way. We design a diverse pretraining dataset and a curriculum learning strategy that smoothly adapts the model to varying prior strengths across mechanisms, graph densities, and variable scales. Extensive experiments on in-distribution, out-of distribution, and real-world datasets demonstrate consistent improvements over existing baselines, with strong robustness and practical applicability.
Guideline-Grounded Evidence Accumulation for High-Stakes Agent Verification
Mar 03, 2026As LLM-powered agents have been used for high-stakes decision-making, such as clinical diagnosis, it becomes critical to develop reliable verification of their decisions to facilitate trustworthy deployment. Yet, existing verifiers usually underperform owing to a lack of domain knowledge and limited calibration. To address this, we establish GLEAN, an agent verification framework with Guideline-grounded Evidence Accumulation that compiles expert-curated protocols into trajectory-informed, well-calibrated correctness signals. GLEAN evaluates the step-wise alignment with domain guidelines and aggregates multi-guideline ratings into surrogate features, which are accumulated along the trajectory and calibrated into correctness probabilities using Bayesian logistic regression. Moreover, the estimated uncertainty triggers active verification, which selectively collects additional evidence for uncertain cases via expanding guideline coverage and performing differential checks. We empirically validate GLEAN with agentic clinical diagnosis across three diseases from the MIMIC-IV dataset, surpassing the best baseline by 12% in AUROC and 50% in Brier score reduction, which confirms the effectiveness in both discrimination and calibration. In addition, the expert study with clinicians recognizes GLEAN's utility in practice.
TFMLinker: Universal Link Predictor by Graph In-Context Learning with Tabular Foundation Models
Feb 09, 2026Link prediction is a fundamental task in graph machine learning with widespread applications such as recommendation systems, drug discovery, knowledge graphs, etc. In the foundation model era, how to develop universal link prediction methods across datasets and domains becomes a key problem, with some initial attempts adopting Graph Foundation Models utilizing Graph Neural Networks and Large Language Models. However, the existing methods face notable limitations, including limited pre-training scale or heavy reliance on textual information. Motivated by the success of tabular foundation models (TFMs) in achieving universal prediction across diverse tabular datasets, we explore an alternative approach by TFMs, which are pre-trained on diverse synthetic datasets sampled from structural causal models and support strong in-context learning independent of textual attributes. Nevertheless, adapting TFMs for link prediction faces severe technical challenges such as how to obtain the necessary context and capture link-centric topological information. To solve these challenges, we propose TFMLinker (Tabular Foundation Model for Link Predictor), aiming to leverage the in-context learning capabilities of TFMs to perform link prediction across diverse graphs without requiring dataset-specific fine-tuning. Specifically, we first develop a prototype-augmented local-global context module to construct context that captures both graph-specific and cross-graph transferable patterns. Next, we design a universal topology-aware link encoder to capture link-centric topological information and generate link representations as inputs for the TFM. Finally, we employ the TFM to predict link existence through in-context learning. Experiments on 6 graph benchmarks across diverse domains demonstrate the superiority of our method over state-of-the-art baselines without requiring dataset-specific finetuning.
Generating Risky Samples with Conformity Constraints via Diffusion Models
Dec 21, 2025Although neural networks achieve promising performance in many tasks, they may still fail when encountering some examples and bring about risks to applications. To discover risky samples, previous literature attempts to search for patterns of risky samples within existing datasets or inject perturbation into them. Yet in this way the diversity of risky samples is limited by the coverage of existing datasets. To overcome this limitation, recent works adopt diffusion models to produce new risky samples beyond the coverage of existing datasets. However, these methods struggle in the conformity between generated samples and expected categories, which could introduce label noise and severely limit their effectiveness in applications. To address this issue, we propose RiskyDiff that incorporates the embeddings of both texts and images as implicit constraints of category conformity. We also design a conformity score to further explicitly strengthen the category conformity, as well as introduce the mechanisms of embedding screening and risky gradient guidance to boost the risk of generated samples. Extensive experiments reveal that RiskyDiff greatly outperforms existing methods in terms of the degree of risk, generation quality, and conformity with conditioned categories. We also empirically show the generalization ability of the models can be enhanced by augmenting training data with generated samples of high conformity.
ODP-Bench: Benchmarking Out-of-Distribution Performance Prediction
Oct 31, 2025Recently, there has been gradually more attention paid to Out-of-Distribution (OOD) performance prediction, whose goal is to predict the performance of trained models on unlabeled OOD test datasets, so that we could better leverage and deploy off-the-shelf trained models in risk-sensitive scenarios. Although progress has been made in this area, evaluation protocols in previous literature are inconsistent, and most works cover only a limited number of real-world OOD datasets and types of distribution shifts. To provide convenient and fair comparisons for various algorithms, we propose Out-of-Distribution Performance Prediction Benchmark (ODP-Bench), a comprehensive benchmark that includes most commonly used OOD datasets and existing practical performance prediction algorithms. We provide our trained models as a testbench for future researchers, thus guaranteeing the consistency of comparison and avoiding the burden of repeating the model training process. Furthermore, we also conduct in-depth experimental analyses to better understand their capability boundary.
LimiX: Unleashing Structured-Data Modeling Capability for Generalist Intelligence
Sep 03, 2025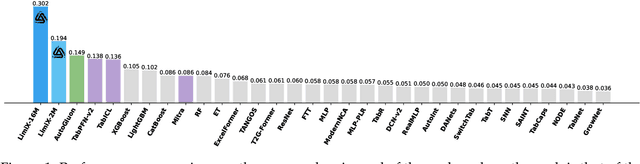
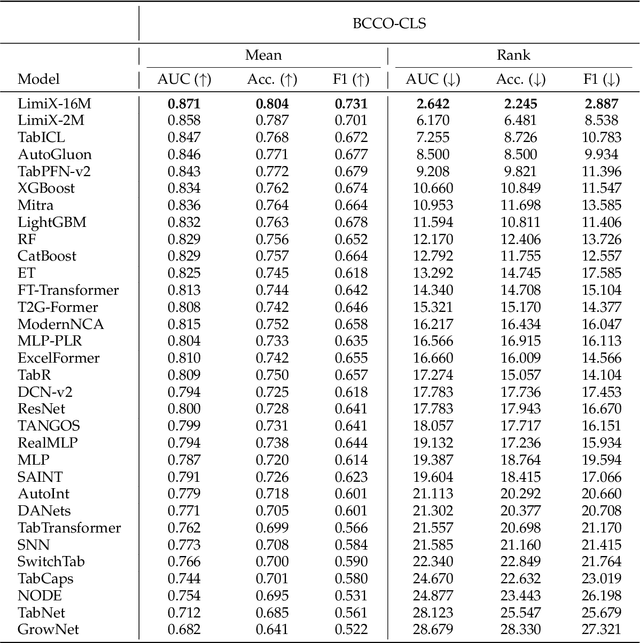
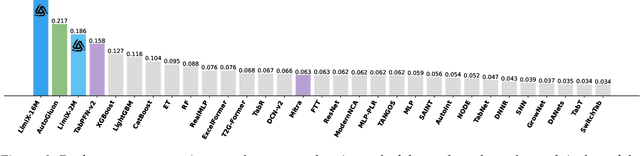
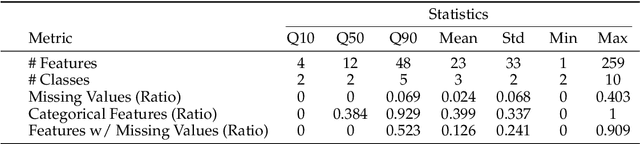
We argue that progress toward general intelligence requires complementary foundation models grounded in language, the physical world, and structured data. This report presents LimiX, the first installment of our large structured-data models (LDMs). LimiX treats structured data as a joint distribution over variables and missingness, thus capable of addressing a wide range of tabular tasks through query-based conditional prediction via a single model. LimiX is pretrained using masked joint-distribution modeling with an episodic, context-conditional objective, where the model predicts for query subsets conditioned on dataset-specific contexts, supporting rapid, training-free adaptation at inference. We evaluate LimiX across 10 large structured-data benchmarks with broad regimes of sample size, feature dimensionality, class number, categorical-to-numerical feature ratio, missingness, and sample-to-feature ratios. With a single model and a unified interface, LimiX consistently surpasses strong baselines including gradient-boosting trees, deep tabular networks, recent tabular foundation models, and automated ensembles, as shown in Figure 1 and Figure 2. The superiority holds across a wide range of tasks, such as classification, regression, missing value imputation, and data generation, often by substantial margins, while avoiding task-specific architectures or bespoke training per task. All LimiX models are publicly accessible under Apache 2.0.
COUNTS: Benchmarking Object Detectors and Multimodal Large Language Models under Distribution Shifts
Apr 14, 2025Current object detectors often suffer significant perfor-mance degradation in real-world applications when encountering distributional shifts. Consequently, the out-of-distribution (OOD) generalization capability of object detectors has garnered increasing attention from researchers. Despite this growing interest, there remains a lack of a large-scale, comprehensive dataset and evaluation benchmark with fine-grained annotations tailored to assess the OOD generalization on more intricate tasks like object detection and grounding. To address this gap, we introduce COUNTS, a large-scale OOD dataset with object-level annotations. COUNTS encompasses 14 natural distributional shifts, over 222K samples, and more than 1,196K labeled bounding boxes. Leveraging COUNTS, we introduce two novel benchmarks: O(OD)2 and OODG. O(OD)2 is designed to comprehensively evaluate the OOD generalization capabilities of object detectors by utilizing controlled distribution shifts between training and testing data. OODG, on the other hand, aims to assess the OOD generalization of grounding abilities in multimodal large language models (MLLMs). Our findings reveal that, while large models and extensive pre-training data substantially en hance performance in in-distribution (IID) scenarios, significant limitations and opportunities for improvement persist in OOD contexts for both object detectors and MLLMs. In visual grounding tasks, even the advanced GPT-4o and Gemini-1.5 only achieve 56.7% and 28.0% accuracy, respectively. We hope COUNTS facilitates advancements in the development and assessment of robust object detectors and MLLMs capable of maintaining high performance under distributional shifts.